

Youtuber Harrison Low created a new robot that can effectively juggle objects like humans, called the JuggleBot. The entire bot is built using carbon fiber material for strength and durability. The Jugglebot is based on the Stewart platform with 6 degrees of freedom. For movement, the Jugglebot uses a custom custom-designed linear actuator. The actuators are built using brushless DC motors in combination with high strength Dyneema string and pulley system. The actuators are controlled with odrive pro drivers which allow for extremely precise control and monitoring of important properties like motor position, velocity and current. Since the placement of these actuators is extremely important to get the maximum range of motion and stability, Harrison relied on simulation to get the best results. The arms are fixed to the base using magnetic ball joints with 3D printed bellows. This 3D printed bellows prevents the actuators from twisting and tangling the cables without restricting the required rotations.
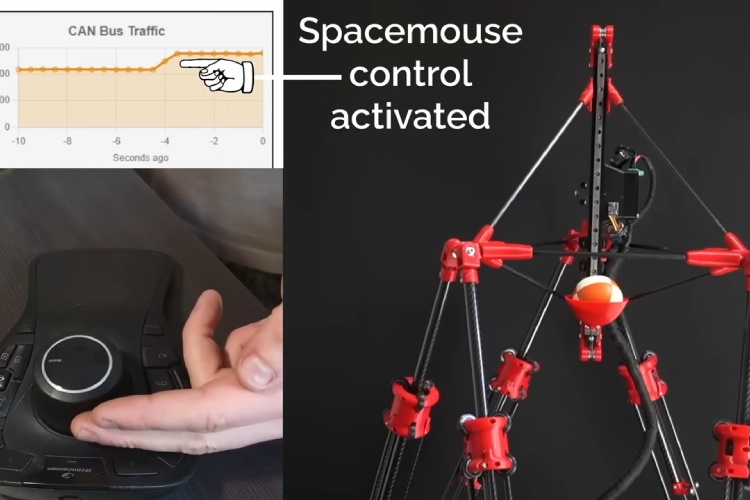
The juggling hand is mounted on a linear rail and driven by a pseudo Cartesian drive. The Cartesian drive design features a tiny BLDC motor mounted to an aluminium extrusion fitted with a 3D printed spool with a Dyneema string tied and wrapped around. With an additional custom tensioning mechanism the hand become backlash free and can be moved extremely quickly with high precision. Now if we look at the brain of the Jugglebot, it is powered by an Nvidia Jetson Orin Nano developer kit, and it coordinates the robot's movements using a ROS 2 network. A mini-brain, a Teensy 4.0, monitors additional sensors and communication. Each actuator is controlled over a CAN bus for faster communication. The bot also features a Teensy board for CAN bus monitoring and Inclinometer sensor interfacing. If you like to know more about the Jugglebot, More details can be found in the Jugglebot Youtube video.
