
A team of researchers at UC Berkeley have developed a new multi-directional tactile sensor to be used as a fingertip for robotic manipulation with robotic hands. Named OmniTact, the sensor uses multiple micro-cameras to detect multi-directional deformations of a gel-based skin. This provides a rich signal from which a variety of different contact state variables can be inferred using modern image processing and computer vision methods.
Built by embedding multiple micro-cameras into an artificial skin made of silicone gel, the multi-directional OmniTact sensor has sensing capabilities on all its sides. This allows robots to have access to tactile feedback while making contact with objects in any direction. The cameras detect multi-directional deformations of the gel-based skin producing a rich signal that can then be analyzed by computer vision and image processing techniques to infer information about the objects that a robot is manipulating.
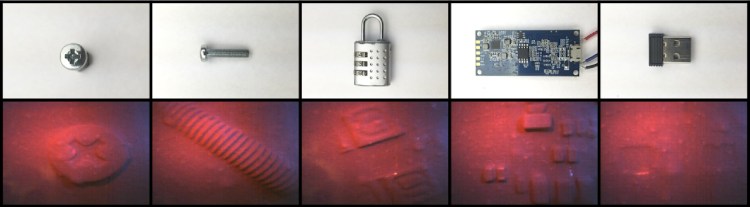
From left to right: M3 Screw Head, M3 Screw Threads, Combination Lock with numbers 4 3 9, PCB, Wireless Mouse USB.
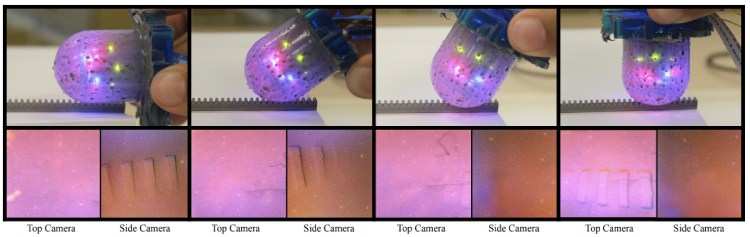
Tactile readings from the OmniTact being rolled over a gear rack.
Additionally, it can provide high-resolution readings, is highly compact and has a curved shape. When integrated into a gripper or robotic hand, the sensor acts as a sensitive artificial finger that allows the robot to manipulate and sense a wide range of objects varying in shape and sizes.
Throughout the experiments with OmniTact, it was discovered that the multi-directional, high-resolution tactile sensing enables certain fine-grained manipulation tasks like connector insertion. Thus, it has been concluded that OmniTact is far more compact than previously developed GelSight sensors and ensures to have a broader range of possible applications. Besides, it could pave the way for the creation of new robots with more sophisticated sensing capabilities in days to come. OmniTact was presented in a paper pre-published on arXiv and is set to be presented at ICRA 2020.
